Radar Signal Processing
Radar Signal Processing
History
Before Radar
Between the planet warfare, parabolic sound reflector were wont to provide early warning. Acoustic reflectors were also getting used . Although they had finite success. and since the growing speed of aircraft within the 1930s conveyed that they might already be too on the edge of influence by the time that they had been noticed. Radio transmitters were already getting used for over a decade for communications.
Left blast during the WW1, (Right) “Whisper Dishes”


Left WW2 Bombers, (Right) Four-horn acoustic locator,1930s


Radio Detection
Radar technology was first patented and given a demonstration of, in 1904 by the German engineer Christian Hülsmeyer. Watson Watt is normally credited with beginning what would later be called Radar. In1935 a radio based detection and ranging was first demonstrated in Great Britain. the main radar system employed by the British consisted of 21 stations placed through the country’s eastern coast.
Today- Radar
Modern radars are very manifold
● Military Radars;
● Imaging Radars;
● Radar Gun;
● Automotive Radars;
● Civil Aviation Radars;
● Weather Radars;
● Ground Penetrating Radars;
Fundamental Principles
Radar stands for Radio Detection And Ranging. An object detection system that transfers electromagnetic (EM) waves and examines the echoes coming by the objects;
Why use radar?
● Radar can work in any weather (e.g. darkness, fog, rain);
● Radar can carry out its function at long and short ranges;
● Radar can supply measurements in high accuracy.
Radar Categorisation
■ Operation:
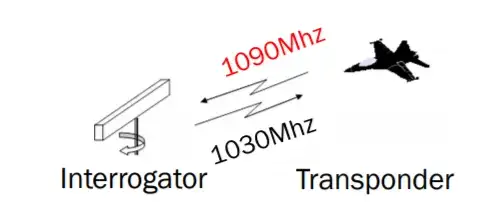
– Primary: Target monitoring;
– Secondary: Transponder on the target (Fig.);
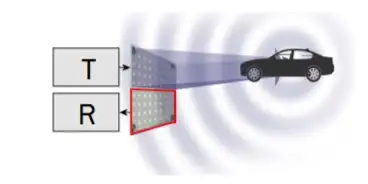
■ Illuminator:
– Active: Uses its transmitter to light up the target;
– Passive: Exploit illuminators of appropriate time (Fig.);

Transmission rate:
– Pulsed: Emit apart pulses;
– Continuous Wave (CW): persistent transmission (Fig.);
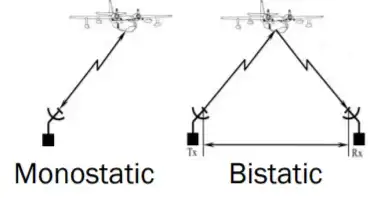
■ Geometry:
– Monostatic: Transmitter and receiver inside the same location (Fig. Left);
– Bistatic: Transmitter and receiver in discrete locations (Fig. Right).
Operating Principles
The effortless radar operation are often divided into 4 steps:
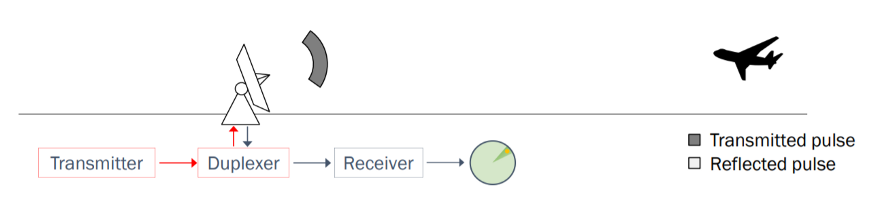
1. The radar is transmitting an EM pulse

2. The radar switches to listening mode
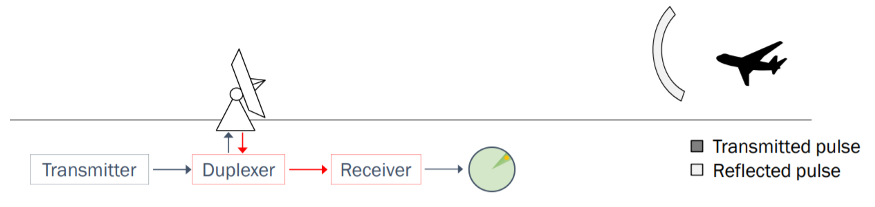
3. The pulse is cast back by a target

The radar obtains the echoes from the transmitted pulse
1. The radar is transmitting an EM pulse
2. The radar switches to listening mode
3. The pulse is cast back by a target
The radar obtains the echoes from the transmitted pulse
Principles of measurement
Radar Equation:
The radar equation is pertaining to the facility of the echo returning to the radar
➔ Low frequencies are more desireable for long-range radar
➔ Low RCS targets are harder to detect.
Distance Determination:
To decide the margin between the radar and a target, the hold up of the echoed pulse is put to use
➔ We know that EM waves travel at 𝒄 = 3 × 108m/s
If echo delay is 𝝉, the range of target is:
Range Resolution:
1. The resolution of radar is its capability to differentiate between targets that are in very close proximity
2. Range Resolution is :
3. Shorter pulses will have higher bandwidth,leading to finer resolution
Range resolution issue between targets in close proximity with one another (T) Two insistent targets; (B) One resolved target. Red part signifies the overlap between the two echoes.
Direction Determination:
● The target’s direction is determined by the directivity of the antenna, which represents the property of the antenna to transmit the energy during a distinct direction.
● Both the target’s azimuth and elevation angles are frequently insistent on by calculating the direction throughout which the antenna is aiming when the echo signal is received.
● The antenna are often guided within the yearned for direction mechanically or electronically.
Pulse repetition Interval:
● Pulse Repetition Interval (PRI) is explained because the interim between ensuing pulses;
● Pulse Repetition Frequency (PRF) is: PRF = 1/PRI
● Duty cycle is the time amount of PRI in which the transference takes place: Duty Cycle = 𝑇/PRI
If an analogous antenna is employed for transition and reception, the duty cycle gives a measure of how long the radar is “blind”.
Maximum Unambiguous Range
The maximum unambiguous range explains the utmost distance to locate a target.
Radar isn't redy to discriminate between echoes from an older and therefore the current transmission.
Radar and two real targets (dark), one in (T1) and one out (T2) of unambiguous range, second target (T2) appears in closer range (light)
Transmitted and received pulses (light) at the radar, radar puzzles the echo from first pulse to second pulse (P1,T2) to an echo from second pulse (P2) and a target at a finer range (𝑅max − 𝑅2).
Data matrix
● Radar goes through each PRI which are stored in memory for further processing;
● Fast Time refers to the various time slots composing a PRI, rate dependent;
Slow Time updates every PRI
Example of two targets, one staying within the same resolution bin (orange) and one occupation different resolution bins (green); Top: Data matrix of ten time resolution bins and four PRI; Bottom: Radar returns to original time;
Data Cube
A Data Cube is an extension to Data Matrix including spatial sampling;
In cases that the radar uses multiple receiving channels, the info matrices from each receiver are stacked to make a data cube.
Illustration of a data cube for 𝐿 time samples in each PRI and 𝑀 PRI during a system composed of 𝑁 receiver channels
Coherent and Doppler processing.
● Spectrum of Continuous Wave Signal
● Consider an endless wave (CW) radar with operating frequency 𝑓0;
In the presence of a target moving with speed 𝑢𝑟 , thanks to the Doppler phenomenon, the echoed signal are going to be shifted in frequency by:
● Positive Doppler shifts (𝑓𝐷 > 0) indicate that the target is moving towards the radar, while negative (𝑓𝐷 < 0) far away from it;
Stationary radar and moving target scenario: (T) geometry of the blip system, (B) frequency observed by the radar
Spectrum of Pulsed Signal
● In most radar systems, the bandwidth of one pulse could also be a couple of orders of magnitude greater than the expected Doppler frequency shift
● Echoes from moving targets cant be discriminated from stationary clatter in spectrum;
● Using consequent pulsed over a coherent pulse interval (CPI), the only pulse bandwidth is split into spectral line of approximate bandwidth 1/CPI.
Range-Doppler Maps
● In a operating target the phase data materializes in each received pulse.
● Different returns are often separated within the Doppler domain.
● Range-Doppler map is diminishing by transforming Fast time to Range and Slow time to Doppler by using Fourier Transform.
Scenario of three targets: two within the same range bin and different velocity (green and orange) and one in several range (blue), (T) In Data matrix two targets are often separated.
(R) In Range-Doppler map all 3 targets are often separated.
Waveforms Design and Pulse Compression
Noise and Interference
● Noise may be a random, unwanted signal characterised by statistical properties;
● Sources of interference are ofteninternal (equipment imperfections) or external (other RF transmissions), passive (clutter) or active (jammers);
The power ratio between the functional and undesireable signal is explained as signal-to interfered-plus-noise ratio (SINR):
Example of a high SNR target (1) and a false detection (2), the radar isnt ready to discriminate between interference and low SNR targets.
Matched Filter
● The understanding of the transmitted signal is employed to design a linear filter that increases the SNR;
● In the existence of additive Gaussian noise, the most favorable filter may be a time reversed kind of the transmitted signal (“matched”);
● For noise given by 𝒞𝒩 0, 𝜎 2 , the utmost SNR is:
● The output of the matched filter is that the auto-correlation of the pulse.
Range of a target at red line (T) before (B) after matched filter
Pulse Compression
● Short pulses lay out good resolution but not sufficient energy for long intervals;
● The resolution is proportionate to bandwidth;
● Using pulse compression, long waveforms are able to do the resolution of a short pulse by expanding their bandwidth through internal modulation;
● A side effect of pulse compression is that the rise of undesired sidelobes;
Matched filter output (T)unmodulated square pulse (B) linear frequency modulated pulse.
Linear FM
● Pulse thrust is often realized using (FM);
● Linear FM (LFM)may be a very fashionable choice;
LFM achieve better resolution while possessing the H/W implementation comparative simple;
● LFM suffers from high sidelobe levels (SLL);
● Using non-linear FM (NLFM) the SLL are frequently reduced but are more complex to achieve.
Top: Real part (L)unmodulated pulse (R) LFM pulse; Bottom: Time-Frequency profile of a LFM pulse.
Ambiguity Function — Definition
The ambiguity function (AF) may be a 2-D function describing the response of a matched filter when the signal is received with a delay 𝝉 and a Doppler Shift 𝒇𝑫 relative to the expected:
● The zero-Doppler cut of the AF is specified by the autocorrelation of the pulse:
● The zero-Delay cut of the AF is specified by Fourier Transform of the squared modulus of the pulse:
Ambiguity Function — Examples
1. Illustration of the AF for (L) an unmodulated pulse, (R) a LFM.
2. Resolution
3. Side Lobe Levels
4. Time Frequency Response
END.
References
Principles Of Modern Radar: Basic Principles — Mark A Richards;
Radar Signals — Nadav Levanon;
Radar System Analysis and Design Using MATLAB — Bassem R. Mahafza
Radar Signal Processor — https://www.radartutorial.eu/10.processing/sp05.en.html
Radar Signal Processing — https://www.sciencedirect.com/topics/engineering/radar-signal-processing

Very informative
ReplyDeleteWell written!
ReplyDeleteSuch a great blog!
ReplyDeleteNice!
ReplyDeleteInformative blog!
ReplyDeleteVery Illuminating!
ReplyDeleteAmazing
ReplyDeleteInformative
ReplyDeleteVery insightful🤟🏿keep it up
ReplyDeleteReally good
ReplyDeleteGreat work!
ReplyDeleteVery informative
ReplyDeleteWell written
ReplyDeletevery informative
ReplyDelete